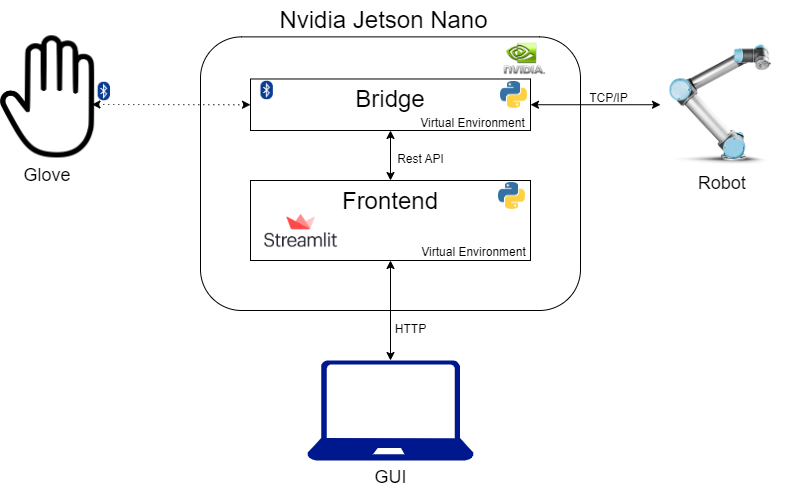
The glove communicates with the robot through an Nvidia Jetson Nano Development Kit. The GUI’s Frontend and the Bridge architecture are in separate virtual environments. On startup of the Nvidia Jetson, both environments are started. The connection to the robot and the glove is done with the User Interface on any device.
The Nvidia Jetson connects to the SmartGlove via Bluetooth enabled with a Bluetooth dongle. Bluetooth is activated on startup of the Nvidia Jetson, but the connection to the Glove is done in the GUI.
The Robot IP Address must be entered on the GUI, to connect to the Robot.